Bon début du mois de fête du travail, chers leaders.
Voici notre partage du mois sur un facteur qui entraine des fermetures inconscientes des entreprises.


Dans la zone où notre entreprise se situe, il y a eu à moyenne 10 coupures de lumières/délestages. Si le retard des employés fait perdre énormément de l’argent, alors nous estimons que les pertes qu’engendre un Délestage de 30 minutes, 1 h, 2 h, 3 h,4 h et, voire plus, parfois triple les pertes mille fois plus. Les conséquences peuvent aller jusqu’à la fermeture de l’entreprise sans que les chefs d’entreprises pensent à un moment donné que ce sont les délestages cumulés. Parce que nous avons déjà accepté inconsciemment le délestage et que tous nos indicateurs d’évaluation majeurs seront orientés ailleurs. La situation de la zone de notre entreprise illustre brièvement le délestage au Cameroun.
Pourquoi il est facile pour un chef d’entreprise d’accepter ou de comprendre facilement que ses employés sont inactifs parce qu’il y a délestage ?
Contrairement au retard qui concerne souvent une ou deux personnes, le délestage condamne toute l’entreprise. Si chaque chef d’entreprise se mettait à évaluer de plus près cette situation, il serait surpris du prix de son silence.
Pour faire face à cette situation, nous ne vous demandons pas de gréver, mais de mener des actions préventives de manière efficace comme l’installation des backups d’énergies pour alimenter vos locaux en cas de délestage.
Vous n’avez pas besoin d’aller très loin pour chercher la solution. Nos experts sont là pour vous accompagner avec nos services en énergie renouvelable. Ceci n’est qu’une mise en situation de la conjoncture des entreprises actuelles. Nous, en tant que des maillons essentiels de l’économie, devons mener des actions efficientes pour accéder la croissance de nos entreprises.
Nous avons joint à ce partage notre brochure de présentation de Dream Smart IT Services SARL. En n’espérant que, ce partage a été utile pour vous, nous souhaiterions avoir un retour d’information de votre part sur la question.
Cordialement, Jiofack de Dream Smart IT Services SARL
 Pour utiliser un module relais 4 canaux 5V dans un projet d’étude, vous pouvez suivre ces étapes :
Pour utiliser un module relais 4 canaux 5V dans un projet d’étude, vous pouvez suivre ces étapes :

Pour utiliser le CNC Shield V3 kit dans un projet d’étude avec Arduino, vous pouvez suivre les étapes suivantes :
1. Assemblage du matériel: Connectez le CNC Shield V3 à votre carte Arduino en suivant les schémas de raccordement fournis avec le kit.
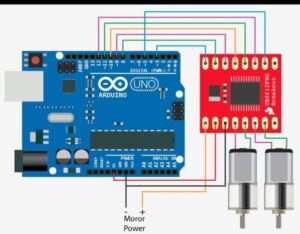
2. Connexion des moteurs : Branchez les moteurs pas à pas ou les moteurs à courant continu aux drivers de moteur A4988 fournis avec le kit.
3. Programmation: Utilisez le langage de programmation Arduino pour contrôler les moteurs via le CNC Shield V3. Vous pouvez trouver des exemples de code et des tutoriels en ligne pour vous guider dans ce processus.
4. Alimentation : Assurez-vous de fournir une alimentation adéquate au CNC Shield V3 et aux moteurs selon les spécifications du fabricant.
Il est important de se référer aux documentations fournies avec le kit et de suivre les bonnes pratiques de sécurité lors de la manipulation de tout équipement électronique.
Si vous avez des questions spécifiques concernant la programmation ou le raccordement du CNC Shield V3, n’hésitez pas à consulter un spécialiste chez Dream Smart IT Services SARL au 6 90 86 13 11
Vous pouvez trouver ce kit au Cameroun sur https://www.dreamsmartitservices.com/store ou appelez-nous au 690861311
 Voici 10 plateformes gratuites pour faire de l’IoT avec Arduino, accompagnées de leurs avantages :
Voici 10 plateformes gratuites pour faire de l’IoT avec Arduino, accompagnées de leurs avantages :
 Pour piloter un bras robotique avec Arduino, vous pouvez suivre ces étapes :
Pour piloter un bras robotique avec Arduino, vous pouvez suivre ces étapes :
 Pour utiliser l’ESP32 avec Arduino, suivez ces étapes :
Pour utiliser l’ESP32 avec Arduino, suivez ces étapes :
1. Téléchargez et installez l’IDE Arduino : Rendez-vous sur le site officiel d’Arduino et téléchargez la dernière version de l’IDE Arduino.
2. Ajoutez la prise en charge de l’ESP32 : Ouvrez l’IDE Arduino, allez dans “Fichier” > “Préférences” et dans “URL de gestionnaire de cartes supplémentaires”, ajoutez le lien suivant : `https://dl.espressif.com/dl/package_esp32_index.json`.
3. Installez les outils ESP32: Allez dans le menu “Outils” > “Cartes” > “Gestionnaire de cartes” et recherchez “ESP32”. Cliquez sur “Installer” pour télécharger et installer les outils nécessaires.
4. Sélectionnez votre carte ESP32 : Une fois l’installation terminée, sélectionnez votre carte ESP32 dans le menu “Outils” > “Cartes”.
5. Écrivez et téléversez votre programme: Vous pouvez maintenant écrire votre programme en utilisant le langage Arduino et le téléverser sur votre ESP32 en appuyant sur le bouton “Téléverser“.
Voici un exemple de code pour clignoter une LED avec l’ESP32 :
“`cpp
void setup() {
pinMode(2, OUTPUT);
}
void loop() {
digitalWrite(2, HIGH);
delay(1000);
digitalWrite(2, LOW);
delay(1000);
}
“`
En suivant ces étapes, vous pourrez commencer à programmer votre ESP32 avec Arduino.
Si vous avez besoin d’aide contactez l’assistance technique de Dream Smart IT Services SARL au 6 90 86 13 11
Vous pouvez trouver ce composant électronique sur https://www.dreamsmartitservices.com/store
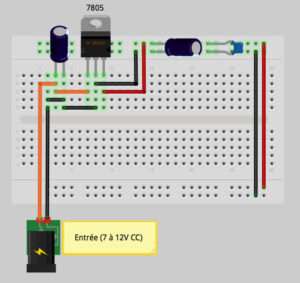 Pour fabriquer une alimentation stabilisée avec Arduino, vous aurez besoin de quelques composants électroniques tels qu’un régulateur de tension, des condensateurs, des résistances et un module de puissance. Voici les étapes à suivre :
Pour fabriquer une alimentation stabilisée avec Arduino, vous aurez besoin de quelques composants électroniques tels qu’un régulateur de tension, des condensateurs, des résistances et un module de puissance. Voici les étapes à suivre :
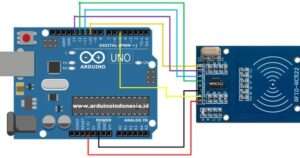
 Pour programmer un contrôle d’accès avec carte RFID en utilisant Arduino, vous pouvez suivre les étapes suivantes :
Pour programmer un contrôle d’accès avec carte RFID en utilisant Arduino, vous pouvez suivre les étapes suivantes :
 Pour programmer un amplificateur opérationnel (AOP) avec Arduino, vous aurez besoin des composants suivants :
Pour programmer un amplificateur opérationnel (AOP) avec Arduino, vous aurez besoin des composants suivants :

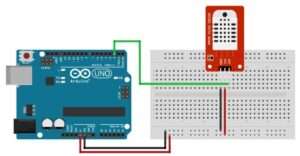 Pour programmer le capteur de température et d’humidité DHT22 dans un projet avec Arduino, vous pouvez suivre les étapes suivantes :
Pour programmer le capteur de température et d’humidité DHT22 dans un projet avec Arduino, vous pouvez suivre les étapes suivantes :

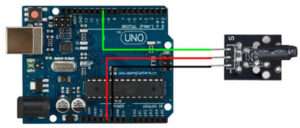
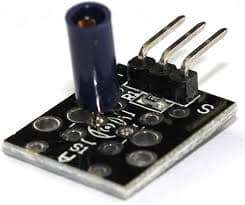 Pour programmer un capteur de commutation de vibrations dans un projet avec Arduino, vous pouvez suivre les étapes suivantes :
Pour programmer un capteur de commutation de vibrations dans un projet avec Arduino, vous pouvez suivre les étapes suivantes :
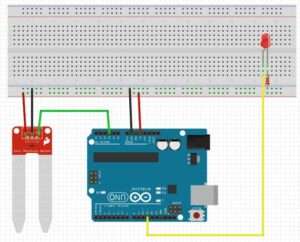
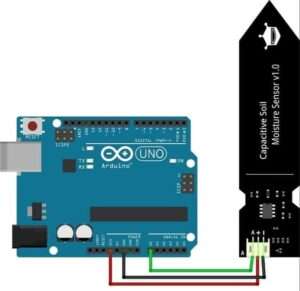 Pour programmer un capteur d’humidité du sol dans un projet avec Arduino, vous pouvez suivre ces étapes :
Pour programmer un capteur d’humidité du sol dans un projet avec Arduino, vous pouvez suivre ces étapes :

 Assembler une voiture robot à 4 roues peut être un projet complexe, mais voici quelques étapes générales pour vous aider à démarrer :
Assembler une voiture robot à 4 roues peut être un projet complexe, mais voici quelques étapes générales pour vous aider à démarrer :
 Pour mieux exploiter un kit Arduino, voici quelques conseils et astuces qui pourront vous aider à maximiser vos projets et votre apprentissage :
Pour mieux exploiter un kit Arduino, voici quelques conseils et astuces qui pourront vous aider à maximiser vos projets et votre apprentissage :
Vous cherchez des idées de projets d’études novateurs et innovateurs pour le développement de l’Afrique ? Nous avons ce qu’il vous faut ! Nos projets répondent aux besoins des entreprises et sont porteurs pour l’avenir de l’Afrique. Voici quelques exemples :
Sujets de Recherche
-
Conception d’un système de contrôle automatique pour un bras robotique
-
Développement d’un circuit électronique pour le contrôle de la vitesse d’un moteur
-
Étude de la régulation de niveau dans un réservoir à l’aide de capteurs et d’actionneurs
-
Conception d’un système de contrôle de température pour un four industriel
-
Réalisation d’un système de contrôle de la luminosité à l’aide de capteurs de lumière
-
Développement d’un système de surveillance automatique de la qualité de l’air
-
Conception d’un système de contrôle de pression pour l’automatisation d’une ligne de production
-
Étude et réalisation d’un système de contrôle d’accès à l’aide de cartes électroniques
-
Conception d’un système de contrôle de flux pour une installation industrielle
-
Développement d’un système de surveillance et de contrôle à distance pour des équipements électroniques
-
Développement d’un système de surveillance et de contrôle à distance pour des équipements électroniques
-
Automatisation des systèmes de gestion d’énergie
-
Conception et programmation d’ascenseurs
-
Automatisation des processus industriels
-
Gestion de l’eau et de l’irrigation dans l’agriculture
-
Commande de robots par la parole
-
Systèmes intégrés dans des habitations ou bâtiments
-
Développement de systèmes de communication sans fil
-
Création de dispositifs médicaux électroniques
-
Automatisation des systèmes de transport en commun
-
Conception de systèmes de contrôle de température
-
Réalisation de robots autonomes
-
Mise en place de systèmes de gestion de l’éclairage
-
Conception de systèmes de surveillance et de sécurité
-
Développement de systèmes de contrôle de la qualité
-
Conception de systèmes de contrôle de la pollution
-
Automatisation des systèmes de production industrielle
-
Réalisation de systèmes de contrôle de la qualité de l’air
-
Conception de systèmes de contrôle de la qualité de l’eau
-
Développement de systèmes de contrôle de la qualité alimentaire
-
Automatisation des systèmes de tri et de conditionnement
-
Conception de systèmes de contrôle de la qualité pharmaceutique
-
Développement de systèmes de contrôle de la qualité de l’environnement
-
Conception de systèmes de contrôle de la qualité des matériaux
-
Automatisation des systèmes de gestion de la chaîne d’approvisionnement
-
Conception de systèmes de contrôle de la qualité des produits électroniques
-
Développement de systèmes de contrôle de la qualité des produits alimentaires
-
Conception de systèmes de contrôle de la qualité des produits pharmaceutiques
-
Conception de systèmes de contrôle de la qualité des produits chimiques
-
Conception et réalisation d’un système météorologiques(solaire, pluie,…) Alimenté par le solaire avec visualisation des informations à distance
-
Inverseur de source intelligent hybride ( solaires& eneo) selon la charge demandé
-
Optimisation de la production d’énergie photovoltaïque grâce à l’automatisme
-
Optimisation du système d’éclairage public par l’utilisation des systèmes solaires photovoltaïques intelligents
-
Suivi et maintenance des systèmes solaires photovoltaïques par un système intelligent de contrôle/visualisation à distance
-
Conception et réalisation d’un suiveur solaire intelligent
-
Développement de systèmes de contrôle de la qualité des produits en bois
-
Conception de systèmes de contrôle de la qualité des produits en caoutchouc
-
Conception de systèmes de contrôle de la qualité des produits en papier
-
Développement de systèmes de contrôle de la qualité des produits en cuir
-
Conception de systèmes de contrôle de la qualité des produits en pierre
-
Automatisation des systèmes de gestion de la qualité
-
Conception de systèmes de contrôle de la qualité des produits en métaux précieux
-
Développement de systèmes de contrôle de la qualité des produits en matériaux composites
-
Conception de systèmes de contrôle de la qualité des produits en caoutchouc naturel
-
Automatisation des systèmes de gestion de la production alimentaire
-
Conception de systèmes de contrôle de la qualité des produits en plastique recyclé
-
Développement de systèmes de contrôle de la qualité des produits en papier recyclé
-
Conception et programmation d’ascenseurs
-
Développement de systèmes de contrôle de la qualité de l’environnement
-
Automatisation des systèmes de gestion de la chaîne d’approvisionnement
-
Conception et réalisation de robots légers et autonomes
-
Développement de systèmes de contrôle pour les robots légers
-
Intégration d’intelligence artificielle dans les robots légers
-
Création de robots pour l’assistance à domicile et la gestion des ménages
-
Conception de robots pour l’éducation et la formation
-
Développement de robots pour la recherche et l’exploration
-
Intégration de capteurs et de systèmes de vision pour les robots légers
-
Conception de robots pour l’industrie pharmaceutique et médicale
-
Développement de robots pour l’inspection et la qualité des produits pharmaceutiques et médicaux
-
Intégration de systèmes d’identification et de suivi pour les robots légers
-
Conception de robots pour l’entretien et la gestion des stocks et des approvisionnements
-
Intégration de systèmes de gestion de l’énergie et d’économie d’énergie pour les robots légers
-
Conception de robots pour l’entretien et la gestion des réservoirs et des systèmes d’eau
-
Développement de robots pour l’industrie de la construction et de la construction métallique
-
Intégration de systèmes de communication et de collaboration pour les robots légers
-
Conception de robots pour l’entretien et la gestion des sites de construction
-
Développement de robots pour l’inspection et la maintenance des équipements de construction
-
Intégration de systèmes de sécurité et de protection pour les robots légers
-
Conception de robots pour l’entretien et la gestion des infrastructures de transport public
-
Développement de robots pour l’inspection et la maintenance des systèmes de transport public
-
Conception de robots pour l’entretien et la gestion des gares et des stations de transport
-
Développement de robots pour l’inspection et la maintenance des équipements de transport public
-
Intégration de systèmes de sécurité et de protection pour les robots légers
-
Conception de robots pour l’entretien et la gestion des aéroports et des ports maritimes
-
Développement de robots pour l’inspection et la maintenance des équipements portuaires
-
Intégration de systèmes de communication et de suivi pour les robots légers
-
Conception de robots pour l’entretien et la gestion des zones de stockage et de stock
-
Développement de robots pour l’inspection et la maintenance des équipements portuaires
-
Intégration de systèmes de sécurité et de protection pour les robots légers
-
Conception de prothèses et d’orthèses
-
Développement de dispositifs médicaux pour la surveillance de la santé
-
Conception de systèmes de diagnostic médical
-
Développement de technologies de traitement de l’image médicale
-
Conception de systèmes de surveillance de la santé à domicile
-
Développement de technologies de réadaptation physique
-
Conception de systèmes de surveillance de la santé en milieu hospitalier
-
Développement de technologies de réadaptation cognitive
-
Conception de systèmes de surveillance de la santé en milieu de soins de longue durée
-
Développement de technologies de réadaptation sensorielle
-
Conception de systèmes de surveillance de la santé en milieu de soins palliatifs
-
Développement de technologies de réadaptation motrice
-
Conception de systèmes de surveillance de la santé en milieu de soins intensifs
-
Développement de technologies de réadaptation respiratoire
-
Conception de systèmes de surveillance de la santé en milieu de soins primaires
-
Développement de technologies de réadaptation cardiaque
-
Conception de systèmes de surveillance de la santé en milieu de soins spécialisés
-
Développement de technologies de réadaptation pour les personnes âgées
-
Conception de systèmes de surveillance de la santé en milieu de soins psychiatriques
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles du mouvement
-
Conception de systèmes de surveillance de la santé en milieu de soins pédiatriques
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de la parole
-
Conception de systèmes de surveillance de la santé en milieu de soins de courte durée
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de la vision
-
Conception de systèmes de surveillance de la santé en milieu de soins de réadaptation
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de l’audition
-
Conception de systèmes de surveillance de la santé en milieu de soins de fin de vie
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles du sommeil
-
Conception de systèmes de surveillance de la santé en milieu de soins de santé mentale
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de l’alimentation
-
Conception de systèmes de surveillance de la santé en milieu de soins de la douleur
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de la peau
-
Conception de systèmes de surveillance de la santé en milieu de soins de la reproduction
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de la vessie
-
Conception de systèmes de surveillance de la santé en milieu de soins de la nutrition
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de la circulation sanguine
-
Conception de systèmes de surveillance de la santé en milieu de soins de la respiration
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de la digestion
-
Conception de systèmes de surveillance de la santé en milieu de soins de la reproduction
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de la coagulation
-
Conception de systèmes de surveillance de la santé en milieu de soins de la reproduction
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de la croissance
-
Conception de systèmes de surveillance de la santé en milieu de soins de la reproduction
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de la fertilité
-
Conception de systèmes de surveillance de la santé en milieu de soins de la reproduction
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de la miction
-
Conception de systèmes de surveillance de la santé en milieu de soins de la reproduction
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de la menstruation
-
Conception de systèmes de surveillance de la santé en milieu de soins de la reproduction
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de la ménopause
-
Conception de systèmes de surveillance de la santé en milieu de soins de la reproduction
-
Développement de technologies de réadaptation pour les personnes atteintes de troubles de la lactation
Chaque semaine, nous allons publier 10 de plus.
NB: N’ayez pas peur de prendre un sujet qui vous passionne. Nos experts sont là pour vous accompagner dans vos projets. Que vous soyez entrepreneur, entreprise , simple particulier ou étudiant. Nous organisons trois semaines de formation purement pratique sur ces projets afin de vous initier de manier concret et palpable sur ce domaine.
voici les modalités pour integrer notre formation de fevrier:
Inscription : 5000F
Frais de participation : 30000f
Ordinateur portable obligatoire
Matériel Electronique gratuits et disponible sur place. Pour vos besoins individuels, regardez ici Dream Smart IT Services SARL/Boutique
Date de début : 06 MAI 2024
Durée: 3 semaines
Créneau horaire disponible : 9h-12,13h-16,18h-21h
Nombre de places : 55 places sur tous l’étendue national
Lieu : À Dream Smart IT Services/ Pk 12 Douala Cameroun
Mode de paiement : cash ou Momo ou OM
Numéro à contacter : 6 90 86 13 11
Visiter nos archives ici Dream Smart IT Services SARL/Page FaceBook
Cher client,
Nous sommes ravis de vous proposer nos services complets pour le dépannage de vos groupes électrogènes. En tant qu’experts dans le domaine, nous nous engageons à vous offrir des solutions rapides et fiables pour garantir le bon fonctionnement de votre équipement et minimiser les temps d’arrêt.
Nos services incluent :
1. Maintenance préventive : Nous effectuons des inspections régulières de vos groupes électrogènes pour détecter tout signe de dysfonctionnement potentiel. Nous effectuons également les opérations de nettoyage et de lubrification nécessaires pour assurer un fonctionnement optimal.
2. Réparation et remplacement des pièces défectueuses : En cas de panne ou de défaillance d’une pièce, notre équipe d’experts est prête à intervenir rapidement pour diagnostiquer et réparer le problème. Si nécessaire, nous procéderons au remplacement des pièces défectueuses avec des composants de haute qualité.
3. Disponibilité 24h/24 et 7j/7 : Nous comprenons l’importance critique de vos groupes électrogènes et sommes disponibles à tout moment pour répondre à vos besoins d’urgence. Notre équipe d’intervention d’urgence est prête à intervenir rapidement pour minimiser les temps d’arrêt et assurer la continuité de vos opérations.
4. Contrats de maintenance personnalisés : Nous proposons des contrats de maintenance personnalisés adaptés à vos besoins spécifiques. Ces contrats assurent une planification régulière des interventions de maintenance préventive et garantissent la disponibilité de notre équipe en cas d’urgence.
5. Rapports détaillés : Après chaque intervention, nous vous fournissons un rapport détaillé qui inclut les travaux effectués, les pièces remplacées et toute autre observation pertinente pour la maintenance future de vos groupes électrogènes.
Nous nous engageons à fournir des services de haute qualité, à utiliser des pièces de rechange d’origine et à respecter les normes de sécurité les plus strictes.
Ne laissez pas une panne de groupe électrogène affecter votre entreprise. Confiez votre dépannage à notre équipe d’experts pour une tranquillité d’esprit totale.
N’hésitez pas à nous contacter au [numéro de téléphone] ou par email à [adresse email] pour discuter de vos besoins spécifiques et obtenir un devis détaillé.
Nous sommes impatients de travailler avec vous et de vous offrir des services de dépannage exceptionnels.
Cordialement, l’équipe de Dream Smart IT Services
Objet : Offre de services complets pour l’installation d’énergie renouvelable photovoltaïque
Cher client,
Nous vous remercions de votre intérêt pour notre entreprise d’installation d’énergie renouvelable photovoltaïque. En tant que leader de l’industrie, nous nous engageons à fournir des solutions efficaces et durables pour répondre à vos besoins énergétiques.
Notre offre de services complets comprend :
1. Évaluation initiale:
– Nous effectuerons une visite sur site pour évaluer vos besoins énergétiques et évaluer la faisabilité de l’installation photovoltaïque.
– Nous analyserons l’ensoleillement, l’orientation du toit et d’autres facteurs clés pour déterminer la taille et la configuration optimales du système.
2. Conception du système:
– Sur la base de l’évaluation initiale, nous concevrons un système photovoltaïque personnalisé qui répondra à vos besoins spécifiques en énergie.
– Nous prendrons également en compte les considérations esthétiques et architecturales pour garantir une intégration harmonieuse du système dans votre bâtiment.
3. Approvisionnement des équipements:
– Nous nous occuperons de l’approvisionnement en équipements de haute qualité, y compris les panneaux solaires, les onduleurs, les supports de fixation, etc.
– Nous travaillons uniquement avec des fournisseurs réputés pour garantir la fiabilité et la durabilité du système.
4. Installation:
– Notre équipe d’installation expérimentée se chargera de l’installation du système photovoltaïque.
– Nous respecterons les normes de sécurité strictes et veillerons à minimiser les interruptions dans vos activités.
5. Mise en service et maintenance:
– Une fois l’installation terminée, nous mettrons en service le système et nous assurerons de son bon fonctionnement.
– Nous vous fournirons également un service de maintenance régulier pour garantir une performance optimale du système à long terme.
Nous sommes convaincus que notre offre complète de services vous permettra de réaliser une transition sans effort vers une énergie plus propre et de réduire vos coûts énergétiques à long terme.
Pour discuter davantage de votre projet et obtenir une proposition personnalisée, n’hésitez pas à nous contacter par téléphone au +237 690861311 ou par email à info@dreamsmartitservices.com
Cordialement, L’équipe de Dream Smart IT Services SARL
Objet : Offre de services complets pour la commercialisation et l’installation des automates dans les entreprises et les industries
Cher client,
Nous vous remercions de l’intérêt que vous portez à notre entreprise de commercialisation et d’installation d’automates. Nous sommes ravis de vous présenter notre offre complète de services, conçue pour répondre à tous vos besoins en matière d’automatisation.
1. Analyse des besoins:
Avant de commencer tout projet, nous effectuons une analyse approfondie de vos besoins en matière d’automatisation. Cette étape nous permet de comprendre vos processus existants, d’identifier les domaines d’amélioration potentiels et de déterminer les solutions automatisées les plus adaptées à votre entreprise.
2. Conseil et proposition:
Sur la base de notre analyse, nous vous conseillons sur les meilleures solutions d’automatisation disponibles sur le marché. Nous vous fournissons une proposition détaillée, comprenant les caractéristiques techniques, les délais de mise en œuvre et les coûts associés à chaque solution.
3. Vente et installation:
Une fois que vous avez validé la proposition, nous procédons à la vente des automates nécessaires à votre projet. Nous nous chargeons également de l’installation et de la configuration complète des automates dans vos locaux. Nos techniciens expérimentés s’assureront que l’installation est réalisée dans les délais convenus et respecte toutes les normes de sécurité.
4. Formation:
Nous proposons une formation complète à vos employés sur l’utilisation et la maintenance des automates installés. Cette formation vous permettra de maximiser l’efficacité de vos opérations automatisées et d’assurer une utilisation optimale de vos nouvelles technologies.
5. Support et maintenance:
Nous vous offrons un support technique continu pour toute question ou problème rencontré avec vos automates. Notre équipe de support est disponible pour vous assister à distance ou intervenir sur site si nécessaire. De plus, nous proposons des contrats de maintenance préventive pour garantir que vos automates fonctionnent de manière optimale en tout temps.
6. Mises à niveau et améliorations:
Nous restons à l’affût des dernières technologies et des améliorations possibles pour vos automates. Nous vous informerons régulièrement des mises à niveau disponibles et des améliorations recommandées. Nous pouvons vous aider à planifier et à mettre en œuvre ces mises à niveau pour améliorer continuellement vos processus automatisés.
7. Assistance en cas de panne:
En cas de panne ou de dysfonctionnement majeur de vos automates, nous intervenons rapidement pour résoudre le problème. Notre équipe de techniciens expérimentés effectuera les réparations nécessaires pour minimiser les temps d’arrêt et vous permettre de reprendre rapidement vos activités normales.
Nous sommes convaincus que notre offre complète de services répondra à tous vos besoins en matière d’automatisation. Nous sommes fiers de notre expertise et de notre engagement à fournir des solutions d’automatisation fiables et performantes à nos clients.
N’hésitez pas à nous contacter pour discuter plus en détail de votre projet et obtenir un devis personnalisé. Nous sommes impatients de travailler avec vous pour optimiser vos opérations et améliorer votre efficacité grâce à l’automatisation.
Cordialement, l’équipe d’experts de Dream Smart IT Services SARL
Objet : Offre de services complets pour la création de sites web professionnels pour les entreprises et le commerce électronique
Cher client potentiel,
Nous vous remercions de l’intérêt que vous portez à notre entreprise de création de sites web professionnels. Nous sommes fiers de vous proposer une gamme complète de services pour répondre à tous vos besoins en matière de présence en ligne et de vente en ligne.
Nos services comprennent :
1. Conception et développement de sites web :
– Analyse approfondie de vos besoins et de votre identité d’entreprise
– Création d’une interface utilisateur moderne et conviviale
– Intégration de fonctionnalités avancées pour répondre à vos objectifs commerciaux
– Développement d’un site web responsive pour une expérience utilisateur optimale sur tous les appareils
2. Conception de sites web e-commerce :
– Mise en place d’une plateforme e-commerce puissante et sécurisée
– Gestion des produits et des catégories avec un système de navigation convivial
– Intégration des passerelles de paiement en ligne et des options de livraison
– Suivi des performances de vente et des analyses pour optimiser votre activité en ligne
3. Optimisation des moteurs de recherche (SEO) :
– Analyse approfondie des mots-clés et de la concurrence
– Optimisation de la structure du site web pour un meilleur classement dans les moteurs de recherche
– Création de contenu de qualité pour attirer un trafic organique ciblé
– Suivi et analyse des performances SEO pour des ajustements continus
4. Intégration des médias sociaux :
– Intégration de boutons de partage social sur votre site web
– Mise en place de liens vers vos profils de médias sociaux
– Création et gestion de campagnes publicitaires sur les réseaux sociaux
– Analyse des performances des médias sociaux pour une optimisation continue
5. Maintenance et assistance :
– Surveillance proactive pour détecter les problèmes et les résoudre rapidement
– Mises à jour régulières du contenu et des fonctionnalités
– Support technique rapide et fiable pour répondre à toutes vos questions
Nous sommes convaincus que notre équipe d’experts en développement web saura répondre à tous vos besoins et vous offrir une solution sur mesure qui fera briller votre entreprise en ligne.
Pour obtenir un devis détaillé et discuter de votre projet, veuillez nous contacter par téléphone au +237690861311 ou par e-mail à info@dreamsmartitservices.com. Nous serions ravis d’avoir l’opportunité de travailler avec vous.
Cordialement, L’équipe d’experts de Dream Smart IT Services SARL
Objet : Offre de services complets pour la consultation en marketing digital professionnel
Cher client,
Nous vous remercions de l’intérêt que vous portez à notre entreprise de consultation en marketing digital professionnel. Nous sommes ravis de vous présenter notre offre de services complets pour vous aider à atteindre vos objectifs de marketing en ligne.
Notre entreprise se spécialise dans la gestion et l’optimisation du marketing digital professionnel des entreprises en termes d’image, de notoriété de la marque et de ces solutions pour ces clients. Nous mettons à votre disposition notre expertise et notre savoir-faire pour maximiser votre retour sur investissement et générer des résultats significatifs.
Nos offres de services comprennent :
1. Audit et analyse :
– Audit de la présence en ligne de l’entreprise
– Analyse de la concurrence
– Évaluation des performances actuelles
– Recommandations stratégiques
2. Stratégie de marketing digital :
– Définition des objectifs de l’entreprise
– Identification du public cible
– Développement d’une stratégie de contenu
– Planification des campagnes publicitaires
3. Optimisation du site web :
– Analyse de l’expérience utilisateur
– Optimisation du référencement (SEO)
– Amélioration de la vitesse de chargement du site
– Intégration des balises méta et des mots clés
4. Gestion des réseaux sociaux :
– Création et optimisation des profils sur les réseaux sociaux pertinents
– Planification et publication de contenu attractif
– Surveillance et gestion de l’engagement des utilisateurs
– Analyse des données et ajustements stratégiques
5. Campagnes publicitaires en ligne :
– Création et gestion de campagnes publicitaires payantes (Google Ads, Facebook Ads, etc.)
– Mise en place de stratégies de remarketing
– Surveillance des performances et optimisation continue
6. Email marketing :
– Création de campagnes d’email marketing ciblées
– Automatisation des emails
– Analyse des performances et optimisation des taux de conversion
6. WhatsApp marketing :
– Création de campagnes de WhatsApp marketing ciblées
– Automatisation des emails
– Analyse des performances et optimisation des taux de conversion
7. Analyse des résultats :
– Suivi des indicateurs clés de performance (KPI)
– Rapports d’analyse réguliers
– Ajustements stratégiques en fonction des résultats obtenus
8. Formation et accompagnement :
– Sessions de formation pour l’équipe de l’entreprise
– Support continu et réponse aux questions
Nous sommes conscients que chaque entreprise est unique, c’est pourquoi nous nous adaptons à vos besoins spécifiques et nous vous proposons des solutions sur mesure pour maximiser vos résultats. Notre équipe d’experts est hautement qualifiée et possède une expérience approfondie dans le domaine du marketing Digital.
Contactez-nous dès maintenant pour discuter de vos objectifs de marketing en ligne et obtenir une offre personnalisée pour votre entreprise. Nous sommes impatients de travailler avec vous et de vous aider à atteindre vos objectifs de croissance.
Cordialement, l’équipe d’experts de Dream Smart IT Services SARL
Objet : Offre de services complets pour la gestion des publicités digitales pour les entreprises
Cher client,
Nous vous remercions de l’intérêt que vous portez à notre entreprise de gestion des publicités digitales. Nous sommes ravis de vous présenter notre offre de services complets pour vous aider à atteindre vos objectifs de marketing en ligne.
Notre entreprise se spécialise dans la gestion et l’optimisation de campagnes publicitaires sur différentes plateformes digitales, telles que Google Ads, Facebook Ads, Instagram Ads, LinkedIn Ads, etc. Nous mettons à votre disposition notre expertise et notre savoir-faire pour maximiser votre retour sur investissement et générer des résultats significatifs.
Nos offres de services comprennent :
1. Stratégie publicitaire personnalisée :
– Analyse approfondie de votre entreprise, de votre marché cible et de vos objectifs commerciaux.
– Élaboration d’une stratégie publicitaire adaptée à vos besoins spécifiques.
– Définition des indicateurs de performance clés (KPI) pour mesurer l’efficacité de la campagne.
2. Recherche de mots clés et ciblage :
– Identification des mots clés pertinents pour votre entreprise et votre audience.
– Développement d’une stratégie de ciblage précise pour toucher votre audience idéale.
– Utilisation d’outils et de techniques avancés pour maximiser la pertinence de vos annonces.
3. Création d’annonces efficaces :
– Rédaction d’annonces convaincantes et attrayantes pour attirer l’attention de votre audience.
– Optimisation des landings pages pour garantir une expérience utilisateur optimale.
– Utilisation d’éléments visuels percutants pour renforcer l’impact visuel de vos annonces.
4. Campagnes publicitaires multi-plateformes :
– Gestion et optimisation des campagnes publicitaires sur différentes plateformes digitales.
– Suivi quotidien des performances des annonces et ajustements stratégiques en conséquence.
– Utilisation de techniques avancées, telles que le retargeting et l’optimisation du budget, pour maximiser la rentabilité.
5. Analyse et rapport de performance :
– Suivi et analyse réguliers des performances de vos campagnes publicitaires.
– Rapports détaillés sur les KPI clés, tels que le taux de clics, le taux de conversion et le retour sur investissement.
– Recommandations pour améliorer l’efficacité de vos campagnes publicitaires.
Nous sommes conscients que chaque entreprise est unique, c’est pourquoi nous nous adaptons à vos besoins spécifiques et nous vous proposons des solutions sur mesure pour maximiser vos résultats. Notre équipe d’experts est hautement qualifiée et possède une expérience approfondie dans le domaine de la gestion des publicités digitales.
Contactez-nous dès maintenant pour discuter de vos objectifs de marketing en ligne et obtenir une offre personnalisée pour votre entreprise. Nous sommes impatients de travailler avec vous et de vous aider à atteindre vos objectifs de croissance.
Cordialement, l’équipe d’experts de Dream Smart IT Services SARL

